Modèle sténopé complet
La composition des trois transformations
![]() ,
,
![]() et
et
![]() peut être résumée par le schéma de la figure 3.
peut être résumée par le schéma de la figure 3.
![[zoom...]](javascript:window.open(%22../res/figure_03_2.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Cela conduit à l'équation du modèle sténopé :
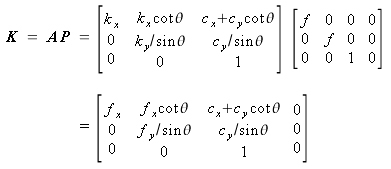
avec :
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_10_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
où
 et
et
 désignent la focale de la caméra en nombre de pixels suivant les directions
désignent la focale de la caméra en nombre de pixels suivant les directions
 et
et
 respectivement.
respectivement.
Les 5 paramètres
 de la matrice
de la matrice
 sont appelés paramètres intrinsèques de la caméra.
sont appelés paramètres intrinsèques de la caméra.
Finalement, le modèle sténopé est décrit par 5 paramètres intrinsèques
et 6 paramètres extrinsèques (3 pour la rotation et 3 pour la translation).
Dans le cas où le « skew factor » est négligé, le modèle sténopé, qui relie les coordonnées 3D
 d'un point exprimé dans le repère du monde aux coordonnées 2D
d'un point exprimé dans le repère du monde aux coordonnées 2D
 de sa projection dans le plan image (point-image = pixel), est souvent écrit de la façon suivante :
de sa projection dans le plan image (point-image = pixel), est souvent écrit de la façon suivante :
Ces relations sont parfois désignées par le terme relations de colinéarité.