Détermination du temps de pose du capteur
Pour déterminer le temps de pose il faut déterminer le nombre d'électrons générés par la source de photons pour 1 pixel (Ne- ) puis imposer que ce nombre est inférieur au nombre total d'électrons à saturation (non saturation sur l'image).
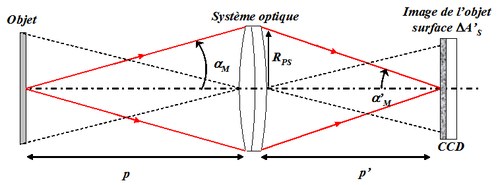
Pour déterminer Ne- on doit chiffrer l'éclairement obtenu au niveau du capteur d'image. La Figure 1 illustre la configuration d'imagerie.
![[zoom...]](javascript:window.open(%22../res/Fig_EC_01_1.png%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Le flux lumineux sortant de l'objectif d'imagerie est donné par :
avec
 la surface de l'image.
la surface de l'image.
Comme on a aussi :
où N = f'/2RPS est le nombre d'ouverture de l'objectif.
L'éclairement dans le plan image est donc [1] :
Pour un pixel de surface px
xpy
le nombre de photoélectrons générés par l'éclairement incident pendant une durée tINT, pour la longueur d'onde
 , est :
, est :
Avec les paramètres d'imagerie nous obtenons :
Juste à saturation du détecteur, on doit avoir
 , d'où on peut déduire la durée d'exposition maximale donnée par :
, d'où on peut déduire la durée d'exposition maximale donnée par :
Cette relation montre que l'on a intérêt à ouvrir au maximum le diaphragme d'ouverture de façon à minimiser le temps de pose et que plus les pixels auront une grande taille (surface) plus le temps de pose sera faible.
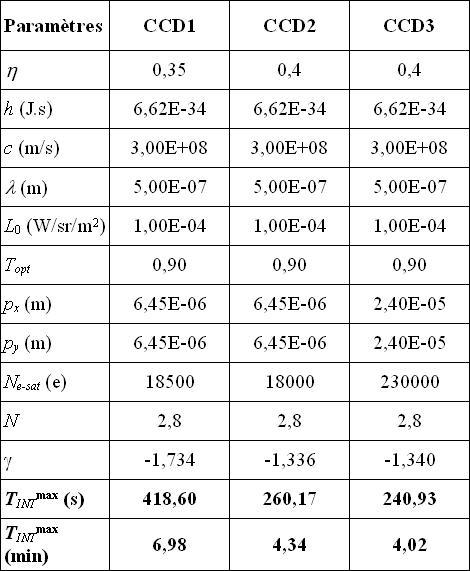
Le Tableau 3 donne les résultats du calcul du temps d'intégration du capteur.
![[zoom...]](javascript:window.open(%22../res/Tab_EC_03_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
On constate que le CCD1 est disqualifié car son temps de pose peut être au maximum de 1 min ce qui est insuffisant puisque qu'avec ce capteur il faudrait un temps de pose d'environ 7 min. Le choix se portera donc sur les CC2 et CCD 3. Pour finaliser ce choix, nous pouvons évaluer le rapport signal sur bruit maximum que l'on peut espérer.