Rapport signal à bruit et optimisation
Définitions
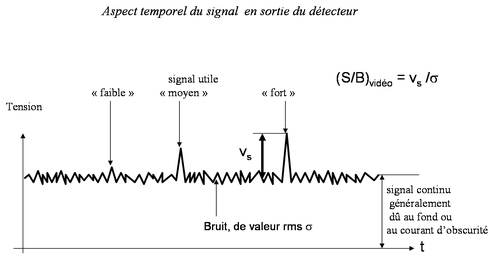
Le bruit mentionné ci-dessus s'ajoute au signal, ce qui rend le signal utile d'autant plus difficile à détecter ou à interpréter que les fluctuations aléatoires ne sont plus négligeables par rapport à lui. La figure 14, qui montre la réponse en tension typique d'un capteur optronique en fonction du temps, est destinée à illustrer simplement le fait que la qualité d'un capteur optronique ne se juge pas seulement par la valeur du signal utile, mais aussi sur le niveau de bruit, c'est à dire sur le rapport signal à bruit.
![[zoom...]](javascript:window.open(%22../res/Image14_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Puisque le signal est bruité, il apparaît autour de sa valeur moyenne une fluctuation instantanée ib (t) sur le courant, dont la variance σ2i en courant dans la bande passante du capteur (σ2v en tension) produit la puissance de bruit Pb suivante, aux bornes de la résistance de charge :
Si is est la valeur du signal électrique utile en sortie de détecteur (valeur moyenne ou variation du signal due à la présence du rayonnement à détecter, suivant les cas, comme on l'a vu précédemment), la puissance électrique du signal utile est :
Par définition, le rapport signal à bruit du capteur, en puissance électrique, est le rapport entre la puissance électrique du signal et celle du bruit, toutes les deux évaluées dans la bande passante du capteur, soit :
On utilise souvent une seconde définition du rapport signal à bruit, dit rapport signal à bruit vidéo, qui est le rapport entre la tension de signal et la tension efficace de bruit (ou rapport entre les courants correspondants), et dont la valeur est la racine carrée de celle du précédent (rapport signal à bruit en puissance) :
De plus, le rapport signal à bruit est souvent exprimé en décibels (dB) :
Filtrage (optique) avant détection
Comme on l'a précisé, il faut calculer un rapport signal à bruit (et le mesurer) dans la même bande passante électronique, à savoir celle qui sera mise en oeuvre dans le capteur, car le signal et le bruit ne varient pas de la même façon en fonction de la bande. On cherchera à l'améliorer par filtrage, en jouant sur les trois paramètres suivants : spectral et spatial (filtrage avant détection), et temporel (filtrage après détection), du signal.
Le filtrage optique a essentiellement pour objet de réduire la valeur moyenne du courant de sortie, et donc le bruit shot. Pour cela, on exploitera au mieux les différences de géométrie et de spectre entre rayonnements utile et parasite, en adaptant l'étendue géométrique et la transmission spectrale du capteur.
-
Dans un capteur infrarouge, on limitera autant que possible l'angle solide de réception du détecteur à la pupille de sortie de l'optique, pour le rendre peu sensible à la lumière parasite due au boitier du capteur, génératrice de bruit.
-
On réduira la lumière parasite due aux sources intenses situées en dehors du champ, au moyen de baffles, ou d'écrans protecteurs, judicieusement situés.
-
Les premiers systèmes de guidage de missiles optroniques comprenaient des réticules en rotation, dont la gravure permettait une sélection de la cible par sa taille, faible, vis à vis du fond, très étendu (ciel, nuages).
-
En imagerie, le champ d'un élément de résolution doit être adapté à la dimension des plus petits détails recherchés sur l'objet.
On veillera à optimiser la bande spectrale du capteur en fonction des spectres des rayonnements, utile et parasite. C'est dans les capteurs actifs (à laser tout particulièrement), que le filtrage spectral peut être le plus efficace, puisque le signal utile est quasi-monochromatique, alors que le spectre du fond est généralement assez large. Dans ces conditions, le filtrage interférentiel est recommandé car, autour de la longueur d'onde du laser, on peut isoler une bande de largeur relative (Δλ/λ) inférieure à ou de l'ordre de 1%.
Si le capteur fonctionne dans l'IR lointain, il est recommandé de refroidir le filtre à la température du détecteur, pour réduire l'émission propre du filtre en dehors de son domaine de transparence (loi de Kirchhoff). Avec les filtres interférentiels fins, il ne faut pas négliger les dérives en fonction de l'angle d'incidence du faisceau, de la température ou de l'humidité, les problèmes de dégradation dans le temps, de la tenue mécanique,...
Filtrage (électronique) après détection : filtrage adapté
Dans beaucoup d'applications, si on connaît le spectre en fréquences du signal électrique à traiter, et s'il est à spectre borné (et si le bruit est blanc), il faut envisager un traitement par filtrage adapté, dans lequel la loi de filtrage en fréquence est proportionnelle à la conjuguée de la transformée de Fourier (spectre en amplitude) du signal. Si le signal à traiter s(t) a pour transformée de Fourier S(f), la réponse en fréquence du filtre adapté est alors :
et la réponse percussionnelle du filtre est : h(t)=KS(t0-t) : c'est à dire, à un facteur près, le signal s(t) retourné dans le temps et décalé de t0, ce qui signifie que la réponse impulsionnelle ne se produit pas à t=0 mais à t=t0, suivant le principe de causalité.
Le filtrage adapté convient particulièrement bien au cas de la détection d'un signal de type impulsionnel dans du bruit : si on suppose que le signal recherché est une impulsion rectangulaire, de durée T, son spectre est de la forme :
La courbe de gain en puissance G(f) du filtre adapté à cette impulsion est donnée par :
La bande passante Δf qui permet de calculer la puissance de bruit de ce filtre, appelée bande passante équivalent de bruit, est celle du filtre, dont le gain serait constant, et égal au gain, à basse fréquences, du filtre réel à basses fréquences et qui délivrerait la même puissance de bruit que le filtre réel considéré, c'est à dire :
Postintégration du signal (TDI: time delay and integration)
S'il est possible de renouveler la mesure du signal effectuée par le capteur, une sommation dite cohérente des enregistrements conduit à un signal utile :
où si (t) est la valeur du signal à l'instant t. Le bruit étant considéré comme décorrélé d'un enregistrement au suivant, la variance de bruit sur la somme est :
Il en résulte que le rapport signal à bruit vidéo sur la sommation de n résultats est amélioré par rapport à la valeur moyenne du rapport signal à bruit obtenue à partir de l'ensemble des courbes individuelles d'un facteur n1/2.