Performance et bilan de liaison (portée)
Les critères de simulation et d'évaluation en performance diffèrent d'un capteur à un autre, en fonction du domaine d'application : télécommunications optiques, détection, imagerie, astronomie, métrologie,.... Par exemple, on juge la performance d'un système de détection en termes de probabilité de détection et de taux de fausse alarme, celle d'un système de télécommunications par son taux d'erreur par bit (ou BER : bit error rate), celle d'un appareil de mesure par la précision, la répétabilité, ... On jugera un appareil de mesure par son incertitude, sa sensibilité,... Dans tous les cas, l'amélioration des performances d'un capteur passe par celle de son rapport signal à bruit.
Pour que le capteur réponde théoriquement au cahier des charges, le concepteur doit s'assurer que la valeur du signal électrique utile soit supérieure à un seuil, et donc que le flux utile incident sur le détecteur dépasse une limite, imposée par les critères évoqués plus haut. Par définition, la valeur de flux utile correspondant à un rapport signal à bruit égal à 1 est le flux équivalent au bruit, FEB, ou "noise equivalent power" (NEP) du capteur. Dans le cas où le bruit du capteur provient essentiellement de son détecteur, son flux équivalent au bruit est égal au produit de la densité spectrale de puissance de bruit du détecteur, en W Hz-1/2 (donnée du fournisseur) par la racine carrée de la bande passante équivalente de bruit du capteur :
Si on dénomme (S/B)min la valeur minimale du rapport signal à bruit, cela entraîne que le flux utile incident sur le détecteur doit être supérieur à :
Les résultats de la simulation fournissant la loi de variation du flux en fonction de la distance de la source au capteur, qui est en général une fonction décroissante, il est alors possible d'établir le bilan de liaison ou bilan de portée du capteur, c'est à dire d'évaluer la distance maximale de la source, qui est celle au delà de laquelle la performance ne répond plus au besoin : cette distance est appelée la portée du capteur (figure 15).
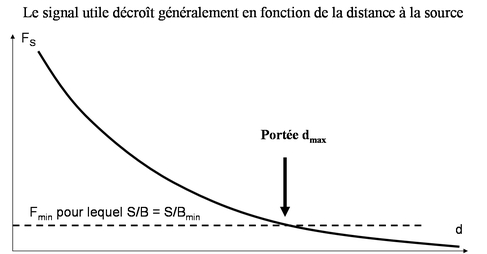
![[zoom...]](javascript:window.open(%22../res/Image15_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Le bilan de portée d'un capteur ne s'adresse qu'à une configuration particulière, et il n'est plus valable si on modifie l'un ou l'autre des paramètres caractéristiques de la chaîne optronique.
Par exemple, la portée d'un système de défense sur une cible (en télémétrie, détection, reconnaissance,...) dépend de l'orientation de la cible, des conditions atmosphériques (fonctionnement de jour ou de nuit, visibilité météorologique, climat, aérosols présents), de l'altitude de l'un et de l'autre et du trajet des rayons lumineux (sol-sol, air-air, air-sol, sol-air,...), du fond sur lequel est vue la cible,...
Dans de nombreux cas, la valeur du flux équivalent au bruit du capteur est peu “parlante” en terme de performance du capteur par rapport au phénomène à analyser. C'est pourquoi, on traduit généralement ce NEP en paramètre équivalent au niveau du phénomène observé. C'est ainsi qu'en imagerie thermique, on évalue la performance d'un capteur (ou d'un détecteur) par sa différence de température équivalente au bruit (NETD : noise equivalent temperature difference), ou différence de température entre deux corps noirs, qui entraîne sur le capteur un rapport signal à bruit égal à 1.