Probabilité de détection et valeur minimale du rapport signal à bruit
Du point de vue de l'utilisateur, le paramètre essentiel dans la performance d'un système de détection est constitué par le couple des valeurs, en probabilité de détection et en taux de fausse alarme, qui le caractérise. On a vu que la première de ces deux informations à exploiter, par le concepteur, est le taux de fausse alarme, qui permet de fixer le seuil. Dans ce qui suit, on montre comment le concepteur doit utiliser la seconde, c'est à dire la spécification en probabilité de détection, pour définir le rapport signal à bruit minimal nécessaire au bon fonctionnement de son capteur.
Si on pose :
Alors :
Les fonctions f et g sont dites réciproques l'une de l'autre, et il vient :
d'où :
D'autre part, avec l'hypothèse de loi gaussienne sur la densité de probabilité du signal utile, la probabilité de détection est égale à :
d'où :
Pour concrétiser les résultats envisageables, limitons nous au cas où le capteur optronique est destiné à détecter des signaux peu fluctuants (signaux dits «certains»), et suffisamment faibles pour que leur présence ne modifie pas de façon significative le bruit du capteur : cette approximation peut se justifier dans de nombreux systèmes de détection infrarouge, dans lesquels le flux de fond incident sur le détecteur est très important vis-à-vis du flux de signal à détecter. Par conséquent, la valeur moyenne du courant issu du détecteur est assez peu modifiée par la présence du signal utile, et si le bruit est dû essentiellement au rayonnement du fond (système de détection dit «BLIP» : Background Limited Infrared Photodetector), les bruits en présence et en absence de signal utile sont assez similaires, ce qui permet d'écrire que :
et
On en conclut que la valeur minimale du rapport signal à bruit permettant de satisfaire aux spécifications du capteur en probabilité de détection et taux de fausse alarme (converti en probabilité de fausse alarme suivant la procédure exposée au paragraphe précédent) :
Le tableau ci-dessous fait la correspondance entre les fonctions réciproques y et g(y) précédemment définies, pour quelques valeurs de y, dans le cas d'un bruit gaussien :
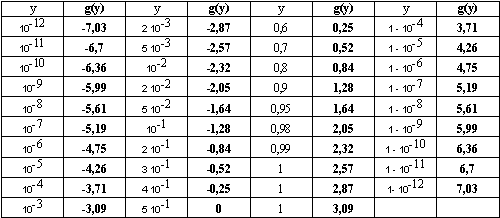
![[zoom...]](javascript:window.open(%22../res/Tableau03_1.png%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
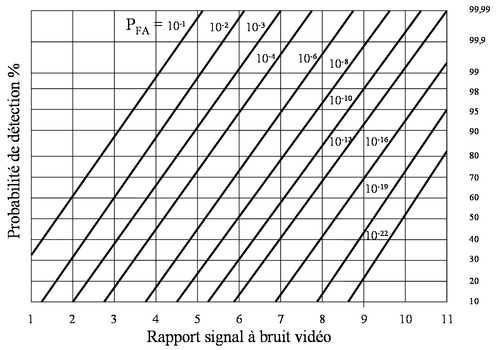
L'abaque suivante (figure 2 (EC)) permet de calculer, dans ces conditions simplificatrices, la valeur minimale du rapport signal sur bruit interne nécessaire pour assurer un couple de valeurs requises en probabilité de détection et de fausse alarme, pour la détection de signaux stables (c'est à dire non fluctuants d'un échantillonnage à un autre), dans du bruit : pour l'exploiter, on repère la valeur assignée en probabilité de détection sur l'axe des ordonnées, à partir de laquelle on trace une droite horizontale jusqu'à la courbe correspondant à la probabilité de fausse alarme imposée ; l'abscisse du point d'intersection, correspond au minimum de rapport signal à bruit nécessaire pour obtenir ce résultat.
![[zoom...]](javascript:window.open(%22../res/Image17_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Par exemple, si la probabilité de détection requise est 90%, et la probabilité de fausse alarme 10-10, la valeur minimale du rapport signal à bruit vidéo est 8.
On peut aussi lire cette abaque de manière différente, si le bilan de liaison du capteur montre que le signal à détecter ne permettra pas d'obtenir un rapport signal à bruit supérieur à une certaine limite S/Bmax . Dans ces conditions, les performances optimales du capteur se trouvent alignées sur la verticale d'abscisse S/Bmax . Par exemple, si on sait pertinement que le rapport signal à bruit ne dépassera pas 6, on peut prévoir que les performances du capteur se limiteront aux couples de valeurs en Pd et PFA définis par cette abscisse, soit typiquement : Pd =70% et PFA=10-7, Pd =85% et PFA=10-6, Pd=93% et PFA =10-5, Pd = 98% et PFA=10-4, ...
Cette étude sur le cas de signaux dits stables est une simplification du problème général de la détection optronique. Si le signal est assez bruité par lui-même (ce qui peut se produire avec des signaux laser présentant du speckle), sa statistique peut être considérablement plus large que celle du bruit propre au capteur. Par rapport à la situation analysée ici (signal stable), il en résulte que la probabilité de détection est améliorée aux basses valeurs de signal, mais par contre fortement réduite à fort signal moyen. Ainsi, pour obtenir une probabilité de détection élevée (typiquement supérieure à 80%) en présence de fluctuations du signal dues au speckle, le concepteur d'un capteur optronique de détection sera contraint à augmenter d'un facteur non négligeable (10 par exemple) la puissance de la source laser du capteur par rapport à celle qui serait nécessaire en absence de fluctuations.