Reference frames and changes of reference frames
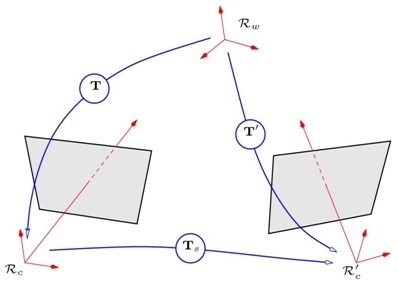
The tridimensional space of the scene is fitted with its orthonormal reference frame
 . Each of the two cameras has its own orthonormal reference frame: we will call them left camera reference frame
. Each of the two cameras has its own orthonormal reference frame: we will call them left camera reference frame
 and right camera reference frame
and right camera reference frame
 . Figure 12 illustrates those three reference frames as well as the rigid transformations allowing the expression of a point in another reference frame.
. Figure 12 illustrates those three reference frames as well as the rigid transformations allowing the expression of a point in another reference frame.
![[zoom...]](javascript:window.open(%22../res/figure_12_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
With those conventions, we can write the following relations down:
These equations show us that the three transformations are not independent since we can determine one of them by using the two others:
When a point
 of the scene is simultaneously visible by both cameras, it gives us two points:
of the scene is simultaneously visible by both cameras, it gives us two points:
 for the left camera and
for the left camera and
 for the right one. Using the geometric model of the camera and the relation of dependence between the three reference frames
for the right one. Using the geometric model of the camera and the relation of dependence between the three reference frames
 and
and
 , we can write the relations of
and
according to M:
, we can write the relations of
and
according to M: