Geometric calibration of a camera or a stereoscopic vision sensor
The projection model
The pinhole model [1, 2, 3, 4] helps modeling a camera by a perspective projection. This model tranforms a 3D point
 into an image-point
into an image-point
 and may be split into three successive basic transformations (see Figure 2).
and may be split into three successive basic transformations (see Figure 2).
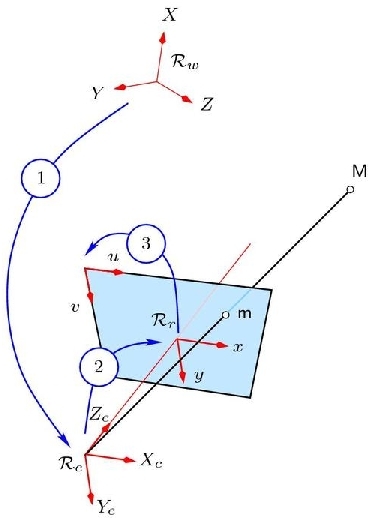
Figure 2: The three basic transformations of the pinhole model and the associated reference frames.
[zoom...]
![[zoom...]](javascript:window.open(%22../res/figure_02_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}