Transformation between the sensor reference frame and the image reference frame
The third and last transformation, referred as
![]() on Figure 2, describes the process that transforms image coordinates
on Figure 2, describes the process that transforms image coordinates
 (in metric units) into discrete image coordinates
(in metric units) into discrete image coordinates
 (pixels).
(pixels).
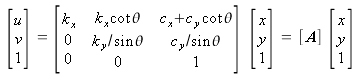
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_07_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
where:
-
 and
and
 (in pixels) represent the coordinates of the optical axis intersection with the image plane (situated, in theory, at the center of the image)
(in pixels) represent the coordinates of the optical axis intersection with the image plane (situated, in theory, at the center of the image) -
 and
and
 represent the number of pixels per unit of length along directions
represent the number of pixels per unit of length along directions
 and
and
 of the sensor respectively (
of the sensor respectively (
 in the case of square pixels)
in the case of square pixels) -
 takes into account the possible non-orthogonality of the lines and the columns in the image. In practice,
takes into account the possible non-orthogonality of the lines and the columns in the image. In practice,
 is very close from to
is very close from to
 . This parameter is referred as “skew factor”.
. This parameter is referred as “skew factor”.
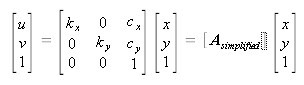
It is often considered that the “skew factor” is negligible
 and equation (3) is then simplified as below:
and equation (3) is then simplified as below:
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_08_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}