Full pinhole model
The composition of transformations
![]() ,
,
![]() and
and
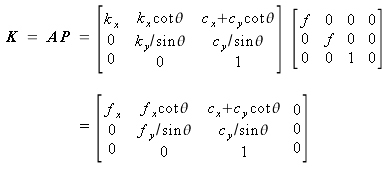
![]() may be summarized by the equation shown in Figure 3.
may be summarized by the equation shown in Figure 3.
![[zoom...]](javascript:window.open(%22../res/figure_03_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
That leads to the equation of the pinhole camera model:
with:
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_10_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
where
 and
and
 represent the focal length of the camera in pixels along directions
represent the focal length of the camera in pixels along directions
 and
and
 respectively.
respectively.
The five parameters
 of the matrix
of the matrix
 are called intrinsic parameters of the camera.
are called intrinsic parameters of the camera.
In the end, the pinhole camera model is described by five intrinsic parameters
and six extrinsic parameters (three for the rotation and three for the translation).
In the case of a neglected “skew factor”, the pinhole camera model, which binds 3D coordinates
 of a point written in the world reference frame with 2D coordinates
of a point written in the world reference frame with 2D coordinates
 of its projection in the image-point (image point= pixel), is often described as below:
of its projection in the image-point (image point= pixel), is often described as below:
We sometimes refer to this relation as colinearity relations.