Référentiels et changements de repères
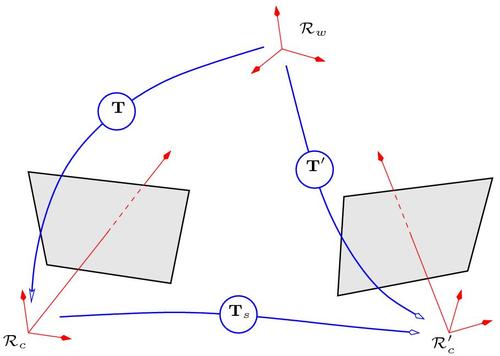
L'espace tridimensionnel de la scène est muni de son référentiel orthonormé
 . Chacune des deux caméras possède son propre référentiel orthonormé : nous les appellerons repère caméra gauche
. Chacune des deux caméras possède son propre référentiel orthonormé : nous les appellerons repère caméra gauche
 et repère caméra droite
et repère caméra droite
 . La figure 12 illustre ces trois référentiels ainsi que les transformations rigides permettant d'exprimer un point dans un autre référentiel.
. La figure 12 illustre ces trois référentiels ainsi que les transformations rigides permettant d'exprimer un point dans un autre référentiel.
![[zoom...]](javascript:window.open(%22../res/figure_12_2.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Avec ces conventions, nous pouvons écrire les relations suivantes :
Ces équations nous montrent que les trois transformations ne sont pas indépendantes puisque nous pouvons déterminer l'une d'entre elles en fonction des deux autres :
Lorsqu'un point
 de la scène est visible simultanément par les deux caméras, ces dernières nous donnent deux points :
de la scène est visible simultanément par les deux caméras, ces dernières nous donnent deux points :
 pour la caméra gauche, et
pour la caméra gauche, et
 pour celle de droite. En utilisant le modèle géométrique de caméra et la relation de dépendance entre les trois repères
pour celle de droite. En utilisant le modèle géométrique de caméra et la relation de dépendance entre les trois repères
 et
et
 , nous pouvons écrire les équations de
et
en fonction de
:
, nous pouvons écrire les équations de
et
en fonction de
: