Matrices à transfert de bloc complet ("Full Frame")
Les anglo-saxons utilisent « Full Frame Transfert », qu'ils abrègent par FFT, à ne pas confondre avec Fast Fourier Transform.
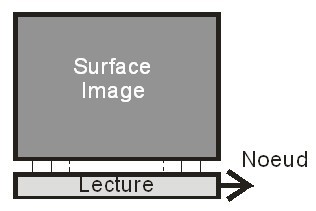
Après intégration de la lumière reçue, les pixels de l'image sont lus ligne par ligne via un registre série qui, ensuite, synchronise ses contenus sur le nœud de détection de sortie (Fig.8 et 9). Toute la charge doit être transférée du registre série avant que la ligne suivante ne soit transférée. Dans des matrices à blocs complets, le nombre de pixels est souvent en puissance de deux (512 x 512, 1024 x 1024, ...) afin de simplifier l'occupation de la mémoire (« memory mapping »). Les matrices dédiées aux applications scientifiques ont généralement des pixels carrés afin de simplifier les algorithmes de traitement d'images.
Pendant la lecture, les photosites sont continuellement irradiés et il peut en résulter une image avec des traînées. Cette traînée (« smear ») sera dans la direction du transport de la charge dans la partie image de la matrice.
![[zoom...]](javascript:window.open(%22../res/Fig_08_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Un obturateur mécanique ou électronique externe peut être utilisé pour isoler la matrice durant la lecture afin d'éviter le « smear ». Si on utilise un éclairage stroboscopique pour obtenir l'image, l'obturateur ne s'avère pas nécessaire si le transfert s'effectue entre les flashes. Si le temps d'intégration est beaucoup plus long que le temps de lecture, alors le smear peut être considérablement élevé. Cette situation se produit très souvent lors des observations astronomiques.
![[zoom...]](javascript:window.open(%22../res/Fig_09_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
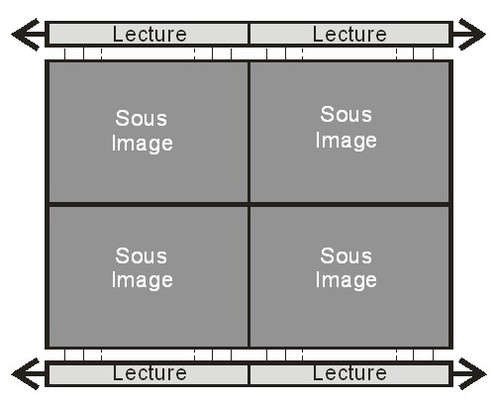
Les vitesses de transfert de données sont limitées par la bande passante de l'amplificateur et la capacité de conversion du convertisseur analogique-numérique. Afin d'augmenter la vitesse effective de lecture, la matrice peut être divisée en sous-matrices qui sont lues simultanément. A la figure 9, la matrice est divisée en quatre sous-matrices. Comme elles sont toutes lues simultanément, la vitesse d'horloge effective est multipliée par quatre. Un logiciel reconstruit ensuite l'image. Ceci est réalisé par un processeur vidéo, externe au capteur CCD, où les données série sont décodées et reformatées.
Les systèmes de surface étendue permettent souvent à l'utilisateur de sélectionner une sous-matrice en lecture. Donc, l'utilisateur peut gérer le compromis entre la vitesse de transfert et la taille de l'image. Ceci permet d'obtenir des vitesses élevées sur une région d'intérêt (sous-bloc). Toutefois, en fonction de l'architecture, certains capteurs ne permettent de sélectionner que des lignes entières, et non pas des morceaux de lignes. De plus, certaines caméras possèdent de la mémoire embarquée, et d'autres non. Dans tous les cas, le temps d'obturation reste le paramètre limitant la vitesse maximale. En dernière limite, pour les caméras ne possédant pas de mémoire embarquée, le facteur limitant sera le taux de transfert de l'information (en Mo/s) vers la mémoire déportée (RAM PC, disque SATA, ...).
Le temps d'obturation permet, si il est suffisamment court, de figer les objets en mouvement. Si la vitesse de l'objet est élevée, son image pourra être en forme de traînée floue.
Depuis peu, on peut disposer d'un capteur Full Frame de 8cm par 8cm dont les pixels « jointifs » mesurent 8,75 x 8,75µm, ce qui correspond à une résolution de 57lp/mm. Ce détecteur permet des acquisitions à 2fr/s (Source Fairchild, capteur CCD595), avec une résolution équivalente aux films photographiques.