Calibrage géométrique d'une caméra ou d'un capteur de vision stéréoscopique
Utilisation des coordonnées homogènes
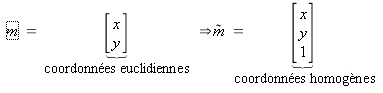
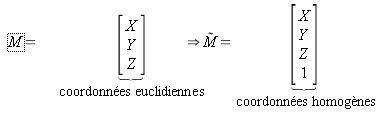
En vision par ordinateur, on utilise souvent les coordonnées homogènes [1, 5, 3, 4] :
en 2D :
en 3D :
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_01_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_02_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Il y a plusieurs avantages à cela. On verra par exemple dans la section "Transformation entre le repère caméra et le repère capteur (plan rétinien)" que cela permet d'exprimer le modèle sténopé par une relation linéaire.