Calibrage géométrique d'une caméra ou d'un capteur de vision stéréoscopique
Transformation entre le repère du monde et le repère caméra
Comme indiqué sur la figure 2,
![]() représente une transformation entre le repère du monde
représente une transformation entre le repère du monde
 (choisi arbitrairement) et le repère caméra
(choisi arbitrairement) et le repère caméra
 (dont l'origine est située au centre optique de la caméra). Cette transformation rigide peut se décomposer en une rotation
(dont l'origine est située au centre optique de la caméra). Cette transformation rigide peut se décomposer en une rotation
 et une translation
et une translation
 . Les paramètres de cette transformation sont appelés paramètres extrinsèques de la caméra.
. Les paramètres de cette transformation sont appelés paramètres extrinsèques de la caméra.
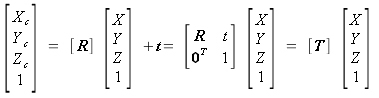
(1)
[zoom...]
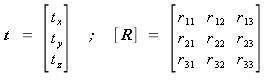
avec :
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_03_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_04_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
 est une matrice 4 × 4.
est une matrice 4 × 4.
La représentation d'une rotation par les 9 paramètres
 n'est pas minimale. En effet, 3 paramètres suffisent pour représenter une rotation (vecteur rotation instantanée, angles d'Euler, angles de Bryant, etc.).
n'est pas minimale. En effet, 3 paramètres suffisent pour représenter une rotation (vecteur rotation instantanée, angles d'Euler, angles de Bryant, etc.).