Calibrage géométrique d'une caméra ou d'un capteur de vision stéréoscopique
Transformation entre le repère caméra et le repère capteur (plan rétinien)
La deuxième transformation, notée
![]() sur la figure 2 relie le repère caméra
sur la figure 2 relie le repère caméra
 au repère capteur
au repère capteur
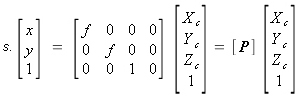
 (plan rétinien). C'est une projection perspective (matrice 3×4, notée
(plan rétinien). C'est une projection perspective (matrice 3×4, notée
 ) qui transforme un point 3D
) qui transforme un point 3D
 en un point-image
en un point-image
 (en unité métrique).
(en unité métrique).
(2)
[zoom...]
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_05_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
où
 désigne la focale de l'objectif utilisé.
désigne la focale de l'objectif utilisé.
L'équation (2) qui traduit la projection perspective s'écrit :
Ces équations sont non-linéaires.
L'utilisation des coordonnées homogènes permet d'écrire la projection perspective (et le modèle sténopé complet) sous forme linéaire (cf. équation (2)).